


自動駕駛汽車的傳感器該如何布置?
無人駕駛汽車的研究越來越多,各環(huán)境感知傳感器的分布位置也不同,到底這些傳感器要遵循一個(gè)什么樣的布置原則?請看本文介紹。
傳感器介紹
智能駕駛汽車環(huán)境感知傳感器主要有超聲波雷達(dá)、毫米波雷達(dá)、激光雷達(dá)、單/雙/三目攝像頭、環(huán)視攝像頭以及夜視設(shè)備。目前,處于開發(fā)中的典型智能駕駛車傳感器配置如表 1所示。
表 1 智能駕駛汽車傳感器配置
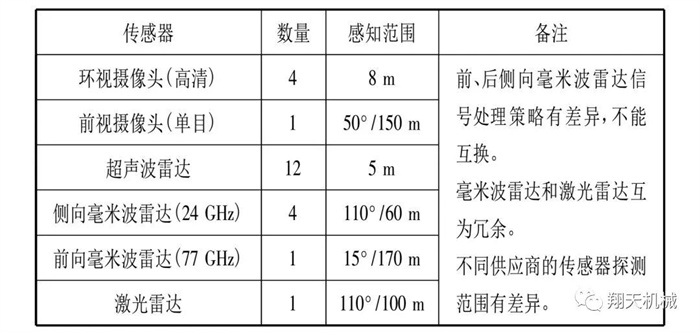
環(huán)視攝像頭:主要應(yīng)用于短距離場景,可識別障礙物,但對光照、天氣等外在條件很敏感,技術(shù)成熟,價(jià)格低廉;攝像頭:常用有單、雙、三目,主要應(yīng)用于中遠(yuǎn)距離場景,能識別清晰的車道線、交通標(biāo)識、障礙物、行人,但對光照、天氣等條件很敏感,而且需要復(fù)雜的算法支持,對處理器的要求也比較高;超聲波雷達(dá):主要應(yīng)用于短距離場景下,如輔助泊車,結(jié)構(gòu)簡單、體積小、成本低;毫米波雷達(dá):主要有用于中短測距的 24 GHz 雷達(dá)和長測距的 77 GHz 雷達(dá) 2 種。毫米波雷達(dá)可有效提取景深及速度信息,識別障礙物,有一定的穿透霧、煙和灰塵的能力,但在環(huán)境障礙物復(fù)雜的情況下,由于毫米波依靠聲波定位,聲波出現(xiàn)漫反射,導(dǎo)致漏檢率和誤差率比較高;激光雷達(dá):分單線和多線激光雷達(dá),多線激光雷達(dá)可以獲得極高的速度、距離和角度分辨率,形成精確的 3D 地圖,抗干擾能力強(qiáng),是智能駕駛汽車發(fā)展的最佳技術(shù)路線,但是成本較高,也容易受到惡劣天氣和煙霧環(huán)境的影響。
不同傳感器的感知范圍均有各自的優(yōu)點(diǎn)和局限性(見圖 1),現(xiàn)在發(fā)展的趨勢是通過傳感器信息融合技術(shù),彌補(bǔ)單個(gè)傳感器的缺陷,提高整個(gè)智能駕駛系統(tǒng)的安全性和可靠性。
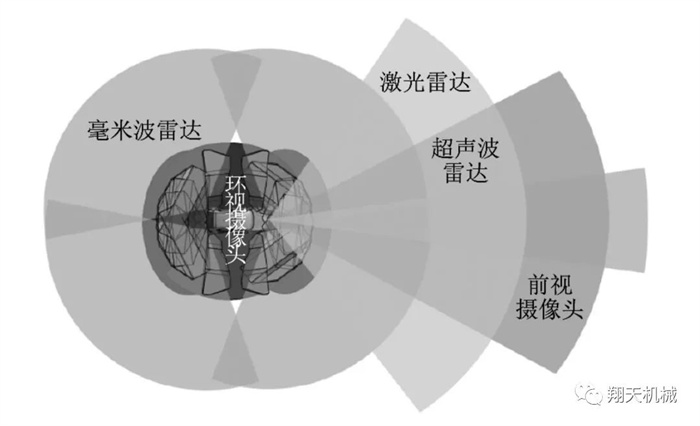
圖 1 環(huán)境感知傳感器感知范圍示意圖

全新奧迪A8配備自動駕駛系統(tǒng)的傳感器包括:
12 個(gè)超聲波傳感器,位于前后及側(cè)方,4 個(gè)廣角 360 度攝像頭,位于前后和兩側(cè)后視鏡,1 個(gè)前向攝像頭,位于內(nèi)后視鏡后方,4 個(gè)中距離雷達(dá),位于車輛的四角,1 個(gè)長距離雷達(dá),位于前方,1 個(gè)紅外夜視攝像頭,位于前方,1 個(gè)激光掃描儀 Laser Scanner,位于前方。
傳感器的布置原則
無人車傳感器的布置,需要考慮到覆蓋范圍和冗余性。
覆蓋范圍:車體360度均需覆蓋,根據(jù)重要性,前方的探測距離要長(100m),后方的探測距離稍短(80m),左右側(cè)的探測距離最短(20m)。為了保證安全性,每塊區(qū)域需要兩個(gè)或兩個(gè)以上的傳感器覆蓋,以便相互校驗(yàn),如下圖所示[1]:
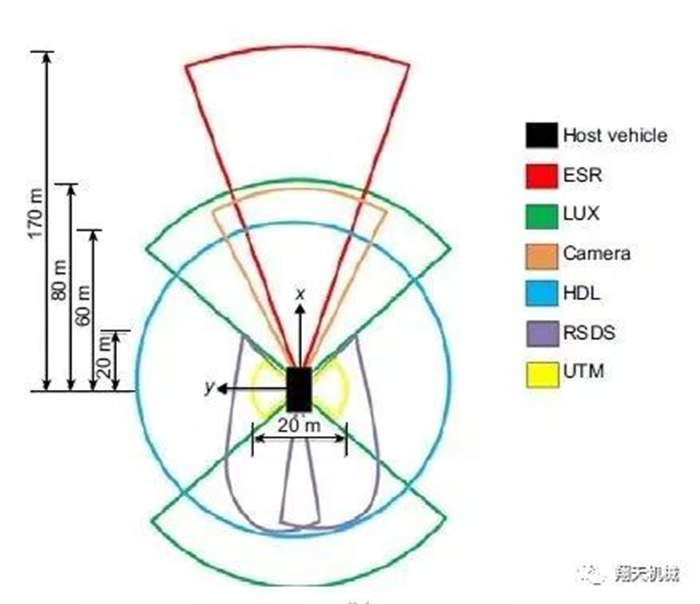
圖2:一種典型的傳感器全覆蓋、多冗余配置示意圖
Host Vehicle是無人車實(shí)體,ESR,RSDS是毫米波,UTM、LUX、HDL是激光,Camera是工業(yè)相機(jī)。從圖中也可以看出,各個(gè)方向上均有多個(gè)傳感器配置。為了簡潔,圖中的Camera只畫出了前方的,實(shí)際上前后左右Camera配置了很多個(gè),使得系統(tǒng)的冗余度更高。
具體安裝在車上,是這樣樣子的:

圖3:傳感器在無人車上的實(shí)際安裝。
大部分傳感器都是隱藏式安裝(車前保、后保內(nèi)),唯一的特例,三維激光安裝在車頂上。
前后探測距離的差異,主要是考慮一些特殊場景下的安全問題。
例如,車輛剛駛出高速公路服務(wù)區(qū),準(zhǔn)備自動變道:初始車速 V1=60km/h;變道過程約需要 t = 3 s;變道完成時(shí)與后方車輛的車間時(shí)距 τ ≥ 2 s (注 1)左后方來車車速 V2 = 120 km/h;為保證變道安全,本車與左后方車輛的初始安全距離至少為
(V2-V1)×(t+τ)=(120km/h-60km/h)×(3s+2s) ≈ 83m
注1:目前自動變道無相關(guān)的法規(guī)要求, 故參考 GB /T20608-2006《智能運(yùn)輸系統(tǒng)自適應(yīng)巡航控制系統(tǒng)性能要求與檢測方法》中, 第5.2.2 條對自適應(yīng)巡航的車間時(shí)距做出規(guī)定:τ_min 為可供選擇的最小的穩(wěn)態(tài)車間時(shí)距, 可適用于各種車速 v 下的 ACC 控制。τ_min ( v) 應(yīng)大于或等于 1 s,并且至少應(yīng)提供一個(gè)在 1.5 ~ 2.2 s 區(qū)間內(nèi)的車間時(shí)距 τ。在自動變道場景的計(jì)算中,為保證安全,選取 τ = 2 s 進(jìn)行計(jì)算。
一般后向 24 GHz 毫米波雷達(dá)的探測距離為 60 m 左右,如果車后安裝一臺24GZ毫米波雷達(dá),60~83 m 是危險(xiǎn)距離。若前后車距在此范圍內(nèi),開始變道時(shí),系統(tǒng)誤判為符合變道條件。隨著左后方車輛高速接近,自動變道過程中安全距離不足,本車中途終止變道,返回本車道繼續(xù)行駛。這種情況會干擾其他車輛的正常駕駛,存在安全隱患,也會給本車的乘員帶來不安全感(見圖 4)。
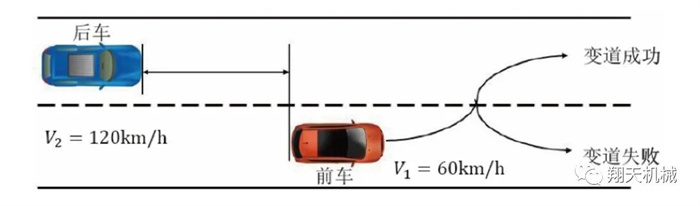
圖 4:自動變道場景
要解決這個(gè)極端場景下智能駕駛汽車自動變道的安全問題,可以考慮增加一個(gè) 77 GHz 后向毫米波雷達(dá),它的探測距離可以達(dá)到 150 m 以上,完全能滿足這個(gè)場景中 83 m 的探測距離要求。當(dāng)然,可以采用探測距離達(dá)到 100 m 以上的 8 線激光雷達(dá)或攝像頭( 如 Tesla 車型) 解決 24 GHz 毫米波雷達(dá)探測距離不足的問題, 還可以通過控制算法設(shè)定車輛必須加速到一定車速才允許自動變道。
而前車安全距離要保證至少100米左右,也保證了車輛有足夠的制動時(shí)間。
冗余度:誰都不希望把自己的生命交付給一個(gè)/種傳感器,萬一它突然失效了呢?所謂的冗余度,也可以劃分為硬件冗余,或軟件冗余。
如圖1中,前方的障礙物有4類傳感器覆蓋,這樣最大程度上保證前方障礙物檢測不會漏檢或者虛警。這屬于硬件冗余。
再比如車道線檢測。現(xiàn)階段大量的對車道線的檢測均是基于視覺(此處不討論基于激光的傳感器),對它的冗余則遵循3選2,或少數(shù)服從多數(shù)的選擇。通過多支算法來保證識別的正確性。
算法設(shè)計(jì)上用到Sensor Fusion,下圖是CMU的多傳感器融合的障礙物檢測/跟蹤框架[2]:
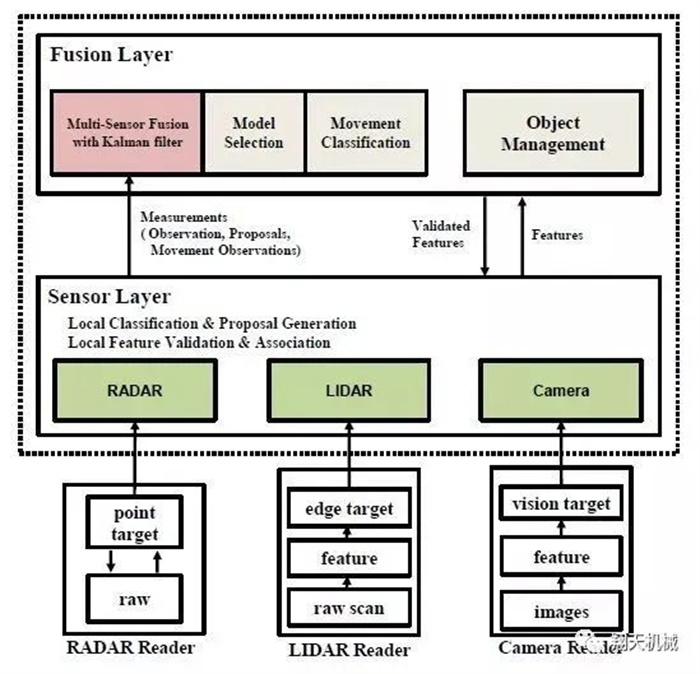
圖5:CMU的障礙物檢測、跟蹤框架。
主要分為兩層,Sensor Layer負(fù)責(zé)收集各個(gè)傳感器測量,并將其抽象為公共的障礙物特征表示;Fusion Layer接收障礙物特征表示,輸出最終的障礙物結(jié)果(位置、速度、類別等)。
除了要保證覆蓋和冗余度,當(dāng)然在實(shí)際安裝中,還要符合每個(gè)傳感器和車輛的安裝條件。比如把激光雷達(dá)放置在高處,增大了掃描的面積。
智能駕駛車輛的傳感器中,以需要考慮因素較多的毫米波雷達(dá)布置為例進(jìn)行介紹。
毫米波雷達(dá)的布置
毫米波雷達(dá)的位置
(1)正向毫米波雷達(dá)
正向毫米波雷達(dá)一般布置在車輛中軸線,外露或隱藏在保險(xiǎn)杠內(nèi)部。雷達(dá)波束的中心平面要求與路面基本平行,考慮雷達(dá)系統(tǒng)誤差、結(jié)構(gòu)安裝誤差、車輛載荷變化后,需保證與路面夾角的最大偏差不超過 5°。
另外,在某些特殊情況下,正向毫米波雷達(dá)無法布置在車輛中軸線上時(shí),允許正 Y 向最大偏置距離為 300 mm,偏置距離過大會影響雷達(dá)的有效探測范圍。
(2)側(cè)向毫米波雷達(dá)
側(cè)向毫米波雷達(dá)在車輛四角呈左右對稱布置,前側(cè)向毫米波雷達(dá)與車輛行駛方向成 45° 夾角,后側(cè)向毫米波雷達(dá)與車輛行駛方向成 30° 夾角,雷達(dá)波束的中心平面與路面基本平行,角度最大偏差仍需控制在 5° 以內(nèi)。
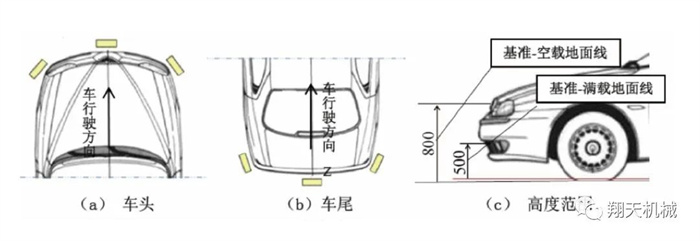
圖 6:毫米波雷達(dá)位置
(3)毫米波雷達(dá)的布置高度
毫米波雷達(dá)在 Z 方向探測角度一般只有 ±5°,雷達(dá)安裝高度太高會導(dǎo)致下盲區(qū)增大,太低又會導(dǎo)致雷達(dá)波束射向地面,地面反射帶來雜波干擾,影響雷達(dá)的判斷。因此,毫米波雷達(dá)的布置高度(即地面到雷達(dá)模塊中心點(diǎn)的距離),一般建議在 500(滿載狀態(tài))~800 mm(空載狀態(tài))之間(見圖 6)。
表面覆蓋材料
毫米波雷達(dá)大多數(shù)情況都是隱藏布置,采用某些不合適的表面覆蓋材料會屏蔽毫米波或引起波束畸變、駐波變差,使雷達(dá)失效或靈敏度降低。因此選用的覆蓋物材料有如下要求。
(1)優(yōu)先選用 PC、PP、ABS、TPO 等電解質(zhì)傳導(dǎo)系數(shù)小的材料,這些材料中不能夾有金屬和碳纖維。如果材料表面有低密度金屬涂層(如車漆),雖對雷達(dá)性能影響不是很大,但必須經(jīng)過測試才可使用。
(2)覆蓋物的表面必須平滑且厚度均勻,不能出現(xiàn)料厚突變或結(jié)構(gòu)復(fù)雜的情況,且厚度最好是雷達(dá)半波長的整數(shù)倍,以減少對雷達(dá)波的扭曲和衰減。
另外,覆蓋物與雷達(dá)面的距離也不能太大,否則雷達(dá)容易把覆蓋物誤判為障礙物。在實(shí)際布置中,一般把雷達(dá)和覆蓋物之間的距離控制在 50~150 mm,如果在造型設(shè)計(jì)階段就把毫米波雷達(dá)數(shù)據(jù)輸入給造型設(shè)計(jì)師,經(jīng)過造型優(yōu)化,最小距離可控制在 15 mm 左右。
毫米波雷達(dá)布置其他參考因素
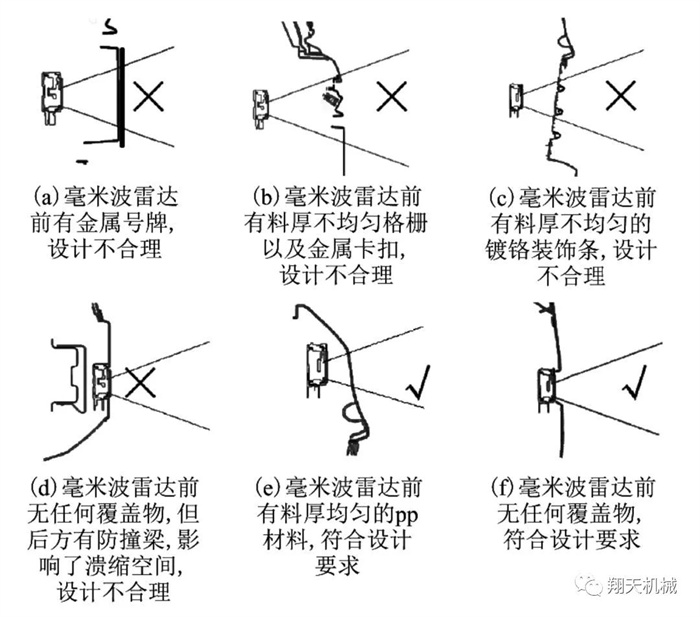
圖 7:毫米波雷達(dá)布置示例
除以上毫米波雷達(dá)本身要求外,在布置時(shí),還需要兼顧考慮其他因素,如:雷達(dá)區(qū)域外造型的美觀性、對行人保護(hù)的影響、設(shè)計(jì)安裝結(jié)構(gòu)的可行性、雷達(dá)調(diào)試的便利性、售后維修成本等問題 [5]。以下是一些示例(見圖 7)。
智能駕駛車輛只能實(shí)現(xiàn)部分場景的自動駕駛,為了能適應(yīng)更多場景,一方面,可以配置性能更好或數(shù)量更多的環(huán)境感知傳感器;另一方面,從降低整車成本考慮,還可以從傳感器的布置優(yōu)化方向入手,充分發(fā)揮傳感器的性能。
